1. 動作
- ラップタイマーと反射ブロックの間をマイコンカーが走り抜けると、ラップタイマーがスタートします。そして再度、マイコンカーがラップタイマーの前を通過したときにタイマーがストップします。
- Arduino Unoは超音波距離センサーと反射ブロックまでの距離を計測していますが、マイコンカーが超音波を遮ると計測距離が短くなります。この原理を利用してラップライマーを起動・停止させます。
2. 設置方法
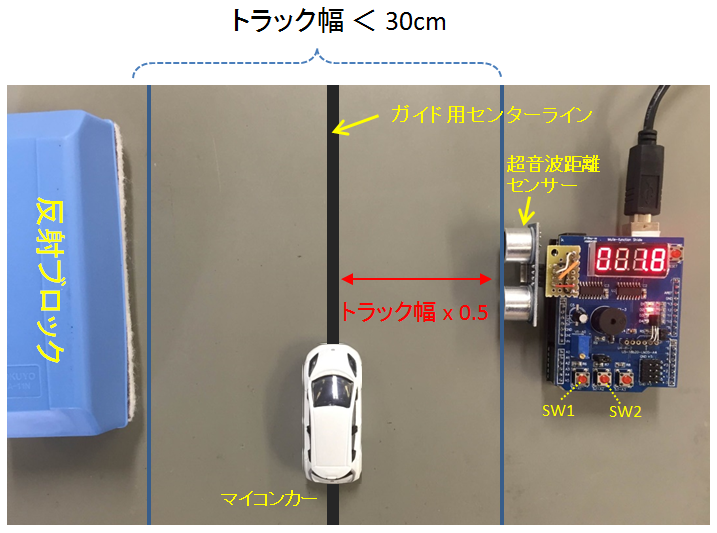
- ラップタイマー(このボード)を、マイコンカーのコーストラックの右サイドにを設置してください。
- 反射ブロックをコーストラックの左サイドに配置してください。このとき、反射ブロックと超音波距離センサーの距離は30cm以下にしてください。
- そして、ラップタイマーに電源を投入してください。
- キャリブレーションモード: 電源がオンすると、LED1から4がオンしブザー音がして、このモードになります。このときLED1(D1)がオンします。 そして、4桁セグメントLEDには反射ブロックまでの距離が表示(単位:センチメートル)されます。反射ブロックを動かすと表示距離が変化します。マイコンカーのガイド用センターラインが反射ブロックと超音波距離センサーのちょうど中間に来るように反射ブロックを配置してください。このモードでSW1を押すと計測モードに移行します。
- 計測モード: このモードでは、LED2(D2)がオンします。 4桁セグメントLEDにはラップタイマーのカウント値が秒で表示(0.1秒まで)されます。表示は"000.0"でストップしています。この状態で、マイコンカーがセンサーの前を横切るとカウントがスタートします。そして再度マイコンカーがセンサーの前に来たときカウントがストップします。この表示値がラップタイム(秒)です。SW2スイッチを押すと、ラップタイムが"000.0"にリセットされカウントスタート状態になります。 "000.0" 以外のカウント停止状態では、マイコンカーがセンサーを通過してもカウントはスタートしませんので注意してください。このモードでSW1を押すとキャリブレーションモードに移行します。
0 件のコメント:
コメントを投稿